GETARAN
MEKANIK

NAMA : HERSAN SIMBOLON
NPM : 23410275
KELAS :
3IC02
UNIVERSITAS GUNADARMA
DEPOK
WEREABLE
ROBOTIC ARM
A.Pengertian
User interface adalah
seperangkat alat yang digunakan oleh operator untuk memudahkan dalam proses entry
data, maupun monitoring data. Contoh user interface sebagai entry
data adalah mouse, keyboard, joystick, dan lain sebagainya.
Sedangkan untuk monitoring data sering dipakai LCD, seven segment
atau window dari sebuah program yang dipakai, misal VB, Delphi, Matlab.
Wearable Robotic Arm merupakan user interface yang digunakan untuk
mengambil data dari hasil gerakan tangan manusia (operator).
Alat ini dipakai atau dipasang di lengan
manusia sehingga mempunyai karakter gerak dan anatomi mirip dengan lengan manusia.
Untuk mendapatkan data dari hasil pergerakan tangan manusia, WRA
dilengkapi dengan sensor gerak, yang bisa berupa potensiometer atau rotary
shaft encoder. Gambaran WRA dapat dilihat seperti berikut.

Contoh wearable robotic arm dan sensornya
Dari gambar di atas,
sensor yang dipakai sudah bisa dikatakan modern. Sensor seperti potensiometer
sudah tidak digunakan, karena dianggap kurang presisi dalam pembacaan data.
Beberapa contoh sensor gerak yang sudah berkembang antara lain :
·
- Polhemus
Fastrak
Sensor posisi yang mempunyai
kemampuan
mendeteksi
6 derajat kebebasan. Seperti layaknya GPS, sensor ini mampu memberikan
koordinat pada ruang gerak lengan.
· Shape -Tape
Sensor posisi dengan pembacaan pada
ujung alat. Digunakan untuk menentukan koordinat posisi end of effector
pada manipulator. Disebut juga metode “teaching by demonstration”,
yaitu kontrol koordinat hasil gerakan operator akan digunakan sebagai trajectory
position oleh arm manipulator.
Wearable Robotic Arm biasa juga disebut Exoskeleton arm.
Pengembangan WRA tidak hanya sebagai trajectory monitoring untuk
gerakan operator, namun lebih dari itu, pengembangannya sudah bisa melakukan
pembacaan baik torsi, maupun dinamika dari gerakan tubuh operator. Dalam
pembuatan WRA untuk laporan tugas akhir ini, kami melakukan beberapa
batasan, dikarenakan penelitian ini baru memasuki tahap awal pengembangan, dan
adanya keterbatasan alat yang digunakan.
WRA akan digunakan hanya untuk membaca data dari gerakan
lengan kanan operator, yang terdiri dari 5 derajat kebebasan.

Gambar Derajat kebebasan lengan manusia
1. Data akan
dibaca dengan joystick game yang telah dimodifikasi sehingga
kompatibel dengan Matlab 2007b.
2.
Sensor yang digunakan masih berupa potensiometer .
3. WRA
harus mampu melakukan pembacaan dari gerakan pada satu sendi tanpa harus
terpengaruh gerakan sendi yang lain.Hal ini mengacu pada konfigurasi mekanik
dari WRA.
4. Data
signal dari WRA akan digunakan sebagai koordinat referensi untuk
pengendalian arm manipulator 5 derajat kebebasan.
Konfigurasi wearble robotic arm untuk
pengendali arm manipulator milik Laboratorium control dan getaran adalah
sebagai berikut :

Gambar WRA Laboratorium Kontrol dan
Getaran Teknik Mesin
Wearable Robotic Arm di atas, dibuat untuk mengendalikan arm manipulator secara langsung dalam sebuah rescue robot. Hasil gerakan dari operator akan dikirimkan langsung ke kontroler rescue robot dengan menggunakan transmitter-receiver radio frekuensi. Namun pada kenyataanya, gerakan operator belum bisa menghasilkan sebuah kontrol yang bagus untuk manipulator. Hasil dari uji coba penggunaan WRA yang sebelumnya menunjukan :
1. Asumsi dimana konfigurasi WRA akan
mengikuti gerakan dari operator masih belum terwujud. Kenyataannya, gerakan
operator harus mengikuti konstruksi dari WRA, sehingga terdapat alur
pengendalian yang kurang bagus dimana operator akan berpikir 2 kali yaitu untuk
mengendalikan arm manipulator dan mengendalikan WRA itu sendiri.
2. Terdapat gerakan dimana satu sendi akan
mempengaruhi gerakan sendi yang lain dikarenakan konstruksi WRA kurang
mampu mengikuti anatomi lengan manusia (interferensi rotasi )
3. Wearable terlalu berat, sehingga kurang
nyaman dipakai dan mempengaruhi kepresisian. Beban massa pada WRA
mengakibatkan pergeseran sensor dari posisi defaultnya.
4. Terdapat kesulitan dalam penempatan
sensor, supaya sensor bisa terus mengikuti suatu posisi sendi.
Poin – poin diatas menjadi masalah yang timbul
ketika WRA pertama dibuat, dan hal ini mendorong untuk melakukan
perbaikan. Tahap pengembangan dan perbaikan yang dilakukan pada penelitian ini,
adalah membuat sebuah wearable yang akan dianalisa dengan menggunakan software
Matlab 2007b.
Pemodelan arm manipulator dengan software, diharapkan membantu
dalam pengembangan WRA. Arm manipulator dimodelkan secara ideal
dalam bentuk virtual reality (file world), sehingga akan sangat peka
terhadap gerakan WRA, dan akan banyak membantu dalam mengetahui
kesalahan – kesalahan yang terjadi pada konfigurasi WRA. Komponen utama
dari WRA adalah sensor gerak dan konstruksi mekanik yang fleksibel
sehingga dapat mengikuti perubahan anatomi dari lengan operator.
B.Komponen 5
DoF Articulated-Arm Robot
Robot Lengan dengan 5 derajat kebebasan ini merupakan arm manipulator
jenis Articulated-Arm, dan mempunyai komponen yang antara lain:

Bentuk nyata lengan robot dengan 5
derajat kebebasan
1. Base
Merupakan
ground atau dudukan dari manipulator. Base tidak bergerak,
diasumsikan terletak pada koordinat (0,0,0), dan merupakan parent
tertinggi dalam konfigurasi manipulator ini.
2. Rotary base
Rotary
base menggunakan joint
jenis revolute. Mempunyai kemampuan rotasi sebesar 180 derajat.
3. Lower arm
Jenis
joint yang digunakan lower arm adalah revolute, dengan
kemampuan rotasi sebesar 180 derajat.
4. Upper
arm
Menggunakan
joint revolute dengan kemampuan rotasi sebesar 180 derajat. Disebut Upper
arm karena berbentuk seperti lengan yang lebih panjang daripada link yang
lain, dan terletak lebih atas daripada lower arm.
5. Wrist
Disebut
wrist, karena karakter rotasinya mirip dengan pergelangan manusia.
Mempunyai kemampuan rotasi sebesar 90 derajat. Pada ujung wrist,
terdapat gripper yang berfungsi sebagai tangan penjepit.
6. Gripper
Terdiri
dari 2 buah komponen, right dan left gripper. Berfungsi untuk
menjepit atau memegang benda target. Masing-masing mempunyai kemampuan berotasi
45 derajat. Gripper ini sebagai end of effector manipulator.
C.Pemodelan Virtual 5 DoF Articulated-
Arm Robot
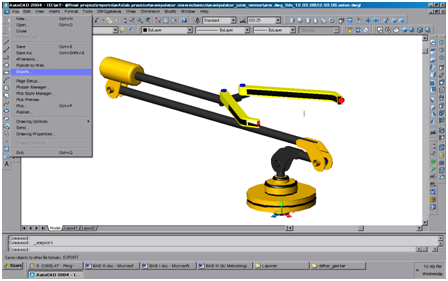
Pemodelan dengan Autocad 2004
Robot lengan dengan jenis articulated-arm (real),
dapat dimodelkan dalam bentuk gambar CAD 3 dimensi. Beberapa Software CADAutocad, Solidworks, Catya, Pro-engineering.
Untuk dapat memodelkan dalam bentuk gambar CAD 3 dimensi, parameter yang
dibutuhkan adalah dimensi (ukuran) sesungguhnya dari robot lengan tersebut.
Setelah dimensi dan nama dari masing-masing bagian dari robot ditentukan,
langkah selanjutya adalah tahap menggambar robot lengan tersebut dengan Autocad
2004 dalam bentuk 3 dimensi.

Gambar Model robot
lengan CAD 3 dimensi
Model CAD diatas masih terlalu kompleks, dan akan
banyak menghabiskan memory komputer sewaktu dilakukan rendering,
pada saat simulasi (running). Oleh karena itu, diperlukan sebuah model
yang lebih sederhana dan masih bisa mewakili baik dimensi maupun bentuk asli
dari robot lengan. Penyederhanaan gambar ditunjukan sebagai berikut :

Gambar Penyederhanaan model dengan mengurangi beberapa komponen
Penyederhanaan
dilakukan tanpa merubah dimensi utama robot lengan. Beberapa komponen yang
tidak terlalu penting dihapus, agar file gambar CAD tidak terlalu
besar. Untuk model yang akan dianalisa secara dinamika, penyederhanaan gambar
harus dilakukan dengan hati-hati dan mempertimbangkan banyak hal.
Karena pada robot lengan ini kami hanya melakukan analisa
kinematika, dimana massa benda tidak menjadi parameter hitungan, maka
penyederhanaan CAD hanya mempertimbangkan dimensi model.

Gambar Penyederhanaan
gambar tanpa merubah dimensi utama
Pada tahap akhir penggambaran,
CAD robot lengan harus ditempatkan pada sistem koordinat yang benar,
untuk memudahkan proses simulasi dengan Matlab. Hal lain yang juga
menjadi acuan adalah perbedaan sistem koordinat yang dipakai oleh AutoCAD,
V-realm Builder, dan Matlab.
Base merupakan parent tertinggi dalam konfigurasi robot lengan. Rotary
base adalah children dari base sekaligus parent untuk lower
arm. Agar robot lengan mempunyai koordinat yang rapi, maka base
ditempatkan pada titik koordinat (0,0,0). Langkah ini dilakukan dengan cara moving
model CAD robot lengan ke titik (0,0,0) dengan Base sebagai komponen
acuan moving.
Matlab hanya bisa diintegrasikan dengan file gambar
berformat World (file.wrl). Software gambar lain seperti Solidworks
mempunyai fitur export langsung ke file world. Sedangkan AutoCAD
mempunyai keterbatasan, yaitu tidak bisa memindai file CAD, ke bentuk World.
Oleh karena itu, diperlukan tahap export file Autocad.dwg ke bentuk 3D
studio (file.3ds).
Dari hal tersebut diatas,
langkah export ke bentuk 3ds dilakukan untuk setiap komponen agar
memudahkan kita dalam pemilihan parent dan children pada saat
konfigurasi ke dalam V-realm Builder. Jadi ada 7 proses export,
dan komponen yang dimaksud adalah : Base, Rotary base, Lower arm, Upper arm,
Wrist, dan Right gripper, serta Left gripper. Window
Autocad berikut menjelaskan cara exporting dari file DWG ke
bentuk file 3ds.
Gambar Proses export file
CAD ke bentuk 3ds
Pada export, akan muncul pop-up window yang
meminta nama file, dan extensi file yang akan disimpan. Pilih “file
types 3ds”, beri nama komponen, kemudian pilih komponen yang akan di export.

Gambar Pilihan nama
komponen dan file types
Setelah melakukan pemilihan komponen, muncul window
yang akan menanyakan property dari file 3ds. Untuk pemodelan
robot lengan ini, kami hanya mengganti “layer” dengan “AutoCAD Object
Types” pada kolom “Derive 3D studio from”. Pilih “OK” dan AutoCAD
akan memindai file CAD bentuk 3D studio.

Gambar Pilihan property file 3ds
FOURIER TRANSFM , FFT WITH MATLAB..
Simulasi system Massa Pegas dengan Variasi kekakuan dan Jarak
Massa dengan Matlab (fft)
Pendahuluan
Deret
Fourier adalah suatu deret berbentuk sinus dan kosinus yang dapat
memperesentasikan
fungsi priodik, dengan Transformasi Fourier sinyal dalam Domain
waktu dapat
dipresentasikan dalam Domain Fekuensi. Dalam Matriks Laboratory
(MatLab) telah
disediakan funsi untuk melakukan Transformasi Fourier tersebut yang
dikenal dengan Fast
Fourier Transform (fft.m).
Aplikasi FFT mencakup
berbagai bidang diantaranya, pada Teknik structural Analysis,
modulation dan
demodulation, Image Processing, Vibration Analysis dll…
Pada Tulisan ini akan
coba digunakan/ tools suatu fungsi fft yang ada dalam Matlab
untuk suatu studi
kasus (case study) massa pegas (Gambar.1).
“Jika suatu Massa M1 digantung
pada suatu pegas yang memilki kekakuan (stiffness) “k”
(N/m) dimana
kondisinya berada dalam keseimbangan. Jika ada satu massa yang lain
disebut massa kedua M2 dijatuhkan
dari ketinggian tertentu (h) meter dan langsung
menempel pada M1 (tanpa
pantulan). Pada kasus ini akan dilihat pengaruh dijatuhkannya
masa M2 terhadap
keseimbangan system: Pengaruh ketinggian (h), serta kekakuan
(konstanta) pegas.
Massa (M1) dan (M2) masing-masing 10 kg dan 20 kg (konstan)”
Dasar
Teori
Semua system yang
memiliki massa dan elastisitas dapat mengalami getaran (vibration),
dengan atau tanpa
ransangan (gaya) dari luar. System tersebut memiliki frekuansi naturan
(alamiah).

Gambar. 1 sistem Massa Pegas
System massa pegas
(gambar 1), dari teori getaran persamaan geraknya dapat
ditentukan
sebagaimana persamaan berikut:
t
k m
m
m gh
t
k
x t
m g ω sinω
( )
2
( ) (1 cos )
1 2
2 2
+
= − + …………(1)
dari persamaan (1)
dengan menggunakan fungsi fft yang ada di Matlab. Fungsi fft.
`Berikut
ini adalah listing program yang disusun pada M- File Matlab, pergerakan system
dengan fungsi waktu
(t), ditransformasikan dalam domain frekuensi, dengan fungsi fft.
Berikut ini adalah
listing program yang dibuat, sbb:
function Y = pfft ( )
%
input data berupa kekakuan pegas
h
m1
m2
k
%
dalam simulasi ini akan dilihat pengaruh dijatuhkannya massa (m2)
%
terhadap keseimbangan sistem, disini akan diset masing-masing massa (m1, m2)
dan
%
ketinggian
%
(jarak) dijatuhkannya massa.
t = 0:0.001:0.2;
h = 2 , %
ketinggian (jarak) m2 ke m1 dalam (meter)
m1 = 100 , %
masasa beban 1 (kg)
m2 = 180 , % massa
beban 2 (kg)
g = 9.81 , %percepatan
grafitasi (m/det^2)
l=0;
in=0;
while(l~=1)
if in==0
k=0;
while
((k<1)|(k>10000))
k = input (‘masukan
koefisien peredam (1-10000) kg.detik/m = ‘);
end
end
f =
(h*k/(m1+m2)^0.5)/(2*pi)
x =
((m2*g)/k)*(1-(cos (2*pi*f*t))+ (m2*((2*g*h)^0.5)/(k*(m1+m2)^0.5))*sin
(2*pi*f*t));
y=x
subplot(2,1,1);
plot(y(1:100));
xlabel (‘waktu
(detik)’), grid on
ylabel (‘abs. Amplitudo’),
grid on
Y = fft(y,512);
MagY = abs(Y);
f = 1000*(0:256)/512;
subplot(2,1,2);
plot(f,MagY(1:257));
xlabel (‘frekwensi
(Hz)’), grid on
ylabel (‘abs.
magnitud’),grid on
end
Berikut ini adalah
hasil dari Running (simulasi) Program, untuk tiga kategori ketinggian
(h) yakni: 0,8 meter,
0,6 meter, dan 0,4 meter. Untuk setiap ketinggian (h) diinput
kekakuan (stiffness)
pegas : 5000 N/m, 7000 N/m, dan 9000 N/m.
Dengan masing-masing
masa (M1) = 10 kg dan (M2) = 20 kg (konstan)
Simulasi I.
Gambar (2) adalah
tampilan untuk ketinggian jatuh (h) = 0,8 meter Massa dua (M2) =
20
kg terhadap (M1 ) =
10 kg, dengan input konstanta pegas 9000 N/m., terlihat sinyal
frekuensi 209,21 Hz
tergambar pada window atas, sementara pada window bawah terlihat
hasil dari transformasi
Fourier dimana magnitude tertinggi pada 209.21 Hz.

Gambar 2.
Ketinggian (h)=0.8 m, k=9000 N/m , f=209,21 Hz
Simulasi II
Gambar (2) adalah
tampilan untuk ketinggian jatuh (h) = 0,6 meter Massa dua (M2) =
20
kg terhadap (M1 ) =
10 kg, dengan input konstanta pegas 9000 N/m., terlihat sinyal
frekuensi 156,91 Hz
tergambar pada window atas, sementara pada window bawah terlihat
hasil dari
transformasi Fourier dimana magnitude tertinggi pada 156,91 Hz.

Gambar 3
h=0.6 m, k=9000 N/m, f = 156,91 Hz
Simulasi III
Gambar (2) adalah
tampilan untuk ketinggian jatuh (h) = 0,4 meter Massa dua (M2) =
20
kg terhadap (M1 ) =
10 kg, dengan input konstanta pegas 9000 N/m., terlihat sinyal
frekuensi 104,61 Hz
tergambar pada window atas, sementara pada window bawah terlihat
hasil dari
transformasi Fourier dimana magnitude tertinggi pada 104,61 Hz.

Gambar 4
h=0.4 m, k=9000 N/m, f = 104,61 Hz
Penutup
• Semakin
tinggi jarak (h), dengan massa dan kekakuan pegas yang sama akan
memberikan sinyal
frekuaensi yang semakin besar pula, hal ini bersesuain dengan
teori dasar’
vibration.
• Transformasi
Fourier merupakan suatu alat bantu yang sangat berguna dan
praktis untuk
“mentransformasikan” suatu pergerakan sinyal dari domain waktu
ke Domain Frekuansi
hal ini ‘kompatibel’ dengan fungsi fft (Matlab).